

2 opisz czujnik cisninia z wyjsciowym sygnałem elektrycznym
3 opisz zasade działania silnika pradu przemiennego
4 pirometr radiacyjny
5 Charakterystyka mechaniczna dwufazowego silnika pradu przemiennego
6 Właczanie terystora t1 do impulsatora
7 sposoby regulacji obrotowej silnika pradu przemiennego
8 Napisz transmitancje i odpowiedz silnikapradu przemiennego gdy wielkoscia wyjsciowa jest predkosc katowa
Ad 1 W silniku tym wirnikiem jest magnes trwały . Działa on tak , że w wyniku odpychania lub przyciągania biegunów magnesu z uzwojeniami , które mają biegu wirnik się obraca. Uzwojenia mają N S lub S N w zależności przesz które uzwojenie przepływa prąd. Wirnik obraca się w kierunek , który ustawimy na programatorze.
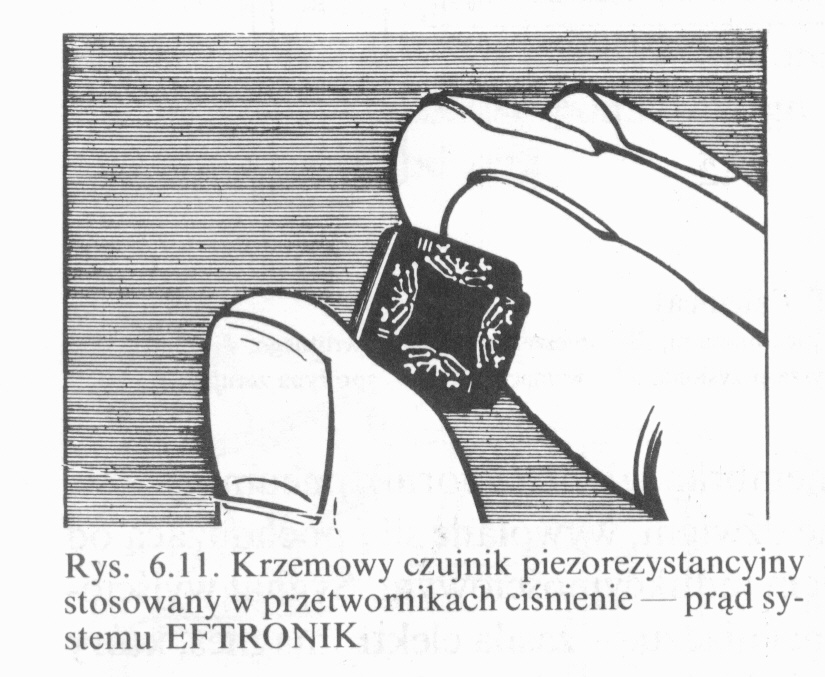
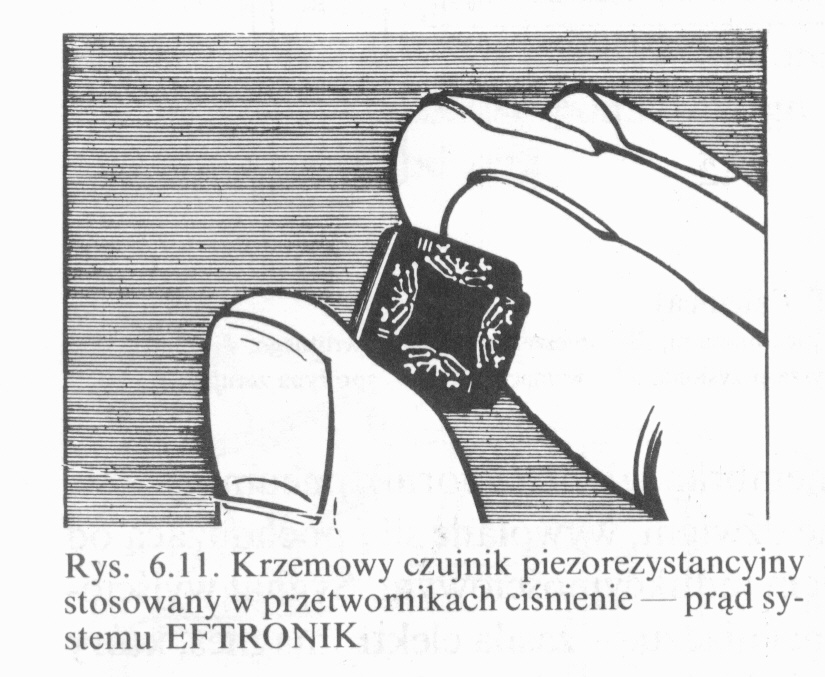
Ad 2 Czujnikiem ciśnienia z wyjściowym sygnałem elektrycznym jest czujnik piezoelektryczny. Czujnik ten zawiera motek , którego gałęzie powstały drogą dyfuzji domieszek w krysztale krzemu. Przy braku ciśnienia rezystancje wszystkich gałęzi mostka są jednakowe i sygnał wyjściowy jest równy zero. Pod działaniem ciśnienia wartości rezystancji rezystorów ulegają zmianie : jedne z nich zwiększają się , inne zmniejszają . Pod działaniem ciśnienia następuje więc rozstrojenie mostka , sygnał wyjściowy jest miarą działającego ciśnienia.
Ad 3 Silnik prądu przemiennego działa tak , że wypadkowe pole magnetyczne wytwarzane przez uzwojenia stojana jest polem wirującym . Wzajemne oddziaływanie pól magnetycznych stojana i wirnika powoduje powstanie momentu obracającego wirnik zgodnie z kierunkiem wirowania stojana. Gdy wirnik się obraca jego prędkość wirowania odejmuje się od prędkości pola wirującego. W zależności od momentu obciążenia wirnik będzie się obracał z mniejszym lub większym poślizgiem.
Ad 4 W pirometrach radiacyjnych temperatura obiektu badanego jest określana na podstawie pomiaru mocy promieniowania w całym paśmie od poczerwieni do nadfioletu. Zależnie od użytego przetwornika promieniowania rozróżniamy termoelektryczne i fotoelektryczne. W pirometrach radiacyjnych promieniowanie od obiektu badanego przez układ optyczny natrafia na termostos ( przetwornik) , który zamienia energie promieniowania na energie cieplną.
Służą do pomiaru temperatury wewnątrz pieców przemysłowych oraz temperatury powierzchni ciał w zakresie 400 – 2500 °C. Dokładność pomiaru takich pirometrów wynosi ok. 2%.

Ad 5 Charakterystyka mechaniczna M = f (ω) jest nieliniowa i jej kształt zależy silnie od rezygnacji wirnika. Silniki z wirnikiem o małej rezystancji mają charakterystyki z odcinkami na których moment napędowy wzrasta wraz ze zwiększeniem prędkości wirowania. Praca na tej części charakterystyki jest niestabilna i silniki takie nie nadają się do sterowania. Przy dostatecznie dużej rezystancji cała charakterystyka ma nachylenie umożliwiające sterowanie silnika. Sterowanie prędkości wirowania odbywa się najczęściej drogą zmiany jednego z napięć zasilających . Zmniejszenie powoduje , że pole wirujące ma kształt elipsy i poślizg wzrasta. Zmniejszając wartość napięcia uzyskamy ciągła regulacje prędkości kątowej wirnika.

Ad 6 Tyrystor T1 trzeba włączyć do impulsatora w stanie przewodzenia. Gdy podamy impuls na bramkę tyrystora T1 zacznie on wtedy przewodzić i popłynie prąd. Równocześnie będzie rozładowywał kondensator , który wcześniej został naładowany w wyniku podania impulsy na bramkę tyrystora T2 oczywiście teraz kondensator jest odwrotnie spolaryzowany .Gdy kondensator się rozładuje prąd przestanie teoretycznie płynąć prąd ale cewka wymusi przypływ prądu ale prąd za cewką nie popłynie bo nie przepłynie przez diodę w stanie zaporowym. Prąd też będzie płynął przez obciążenie czynne. Stan ten będzie trwał dopóki nie podamy impulsu na T2.

Ad 7 Zmiana liczby par biegunów – osiąga się przez zmianę liczby par biegunów w stojanie. Realizuje się to zwykle umieszczając w stojanie kilka niezależnych uzwojeń o różnych liczbach par biegunów (z reguły nie więcej niż dwa) lub jedno uzwojenie o przełączalnej liczbie par biegunów Przełączając zasilanie pomiędzy uzwojeniami, otrzyma się pola wirujące z różnymi prędkościami.
Zmiana częstotliwości napięcia zasilania –częstotliwość zasilania wpływa na prędkość wirowania pola magnetycznego wytwarzanego w stojanie, czyli na prędkość synchroniczną silnika. Zmieniając jej wartość możemy płynnie zmieniać prędkość silnika w zakresie od postoju do prędkości nawet przekraczającej prędkość znamionową.(przekraczając prędkość znamionową trzeba wziąć pod uwagę wytrzymałość mechaniczną silnika i wytrzymałość elektryczną izolacji).
Układy kaskadowe na stały moment - wprowadzenie dodatkowego źródła napięcia sinusoidalnego do obwodu wirnika . Źródło dodatkowego napięcia trójfazowego stwarza możliwości regulacji wartości amplitudy , częstotliwości oraz fazy w stosunku do napięcia wirnika Prostszym sposobem jest zastosowanie prostownika niesterowalnego w obwodzie wirnika i wprowadzenie do obwodu pośredniego prądu stałego dodatkowego regulowanego źródła napięcia stałego.
Układy kaskadowe na stałą moc – wprowadzenie do obwodu Ed powoduje wzory wypadkowej Ew .Przy stałej impedancji wirnika ze wzrostem Ew zwiększy się prąd wirnika .spowoduje to wzrost prędkości obrotowej .Przy małych kątach równowaga momenty elektromagnetycznego i oporowego nastąpi przy ujemny poślizgu. Jeśli kat będzie mniejszy od 90 to wypadkowa Ew zmniejszy się , prąd i moment zmaleją spowoduje to zmniejszenie prędkości kątowej silnika .Przy odpowiednio dobranych wartościach Ew i kąta można układ zatrzymać i przeprowadzić jego nawrót.
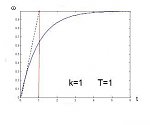
Ad 8 Element całkujący rzeczywisty transmitancja : G(s) = k / s ( 1 + sT)

Prosze sprawdzić moje odpowiedzi na pytania w razie błędów prosze poprawić w razie gdyby czegoś brakowało prosze dopisać. Jak byscie jeszcze cos dopisali do pytań prosze dopisać. Możecie rozszeżyć opoiwedzi na pytnia. Z góry dziekuje za pomoc





{kind=link}